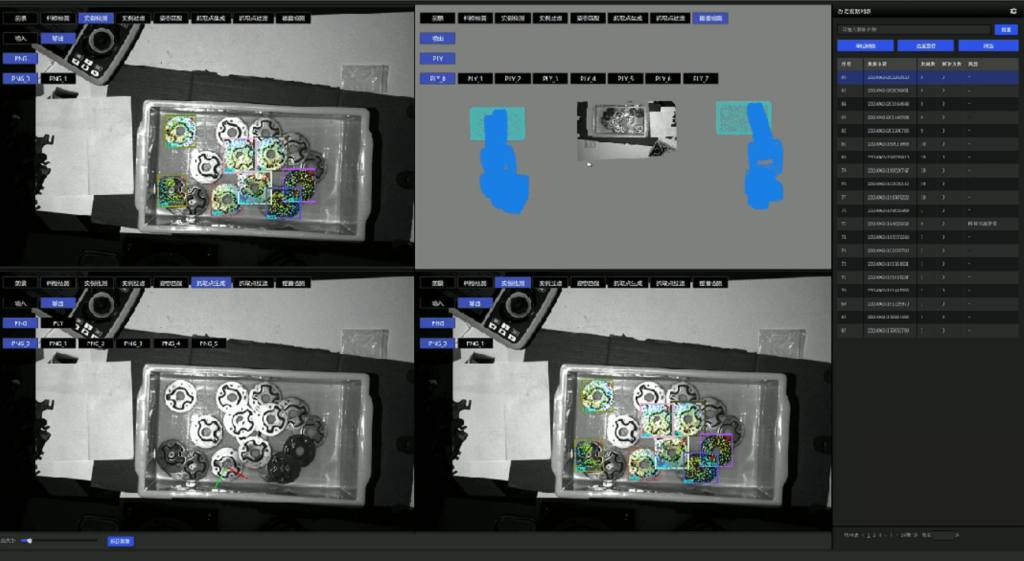
在机器人技术领域,3D视觉引导无序抓取是一项极具挑战性的任务,它要求机器人能够在杂乱无序的环境中准确识别、定位并抓取各种形状、大小和材质的物体。这一过程不仅涉及到复杂的物体识别和定位问题,还需要选择最佳的抓取点,并执行精确的抓取策略。传统的方案都会通过大量的现场测试,和点位校准来优化工件的抓取姿态,费时费力,如果遇到工件换产,还需要耗费大量时间重新采集标注并实际测试效果。
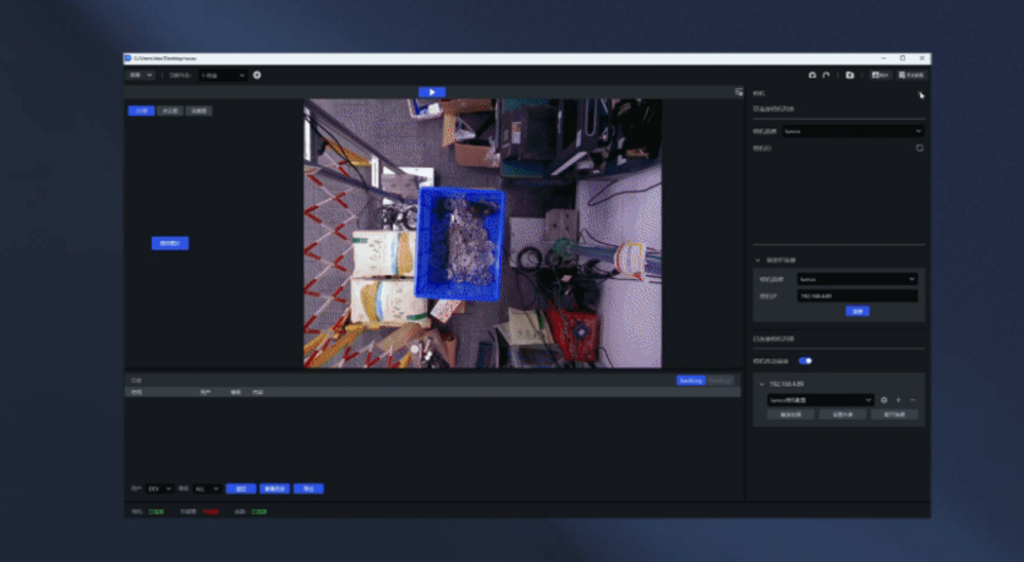
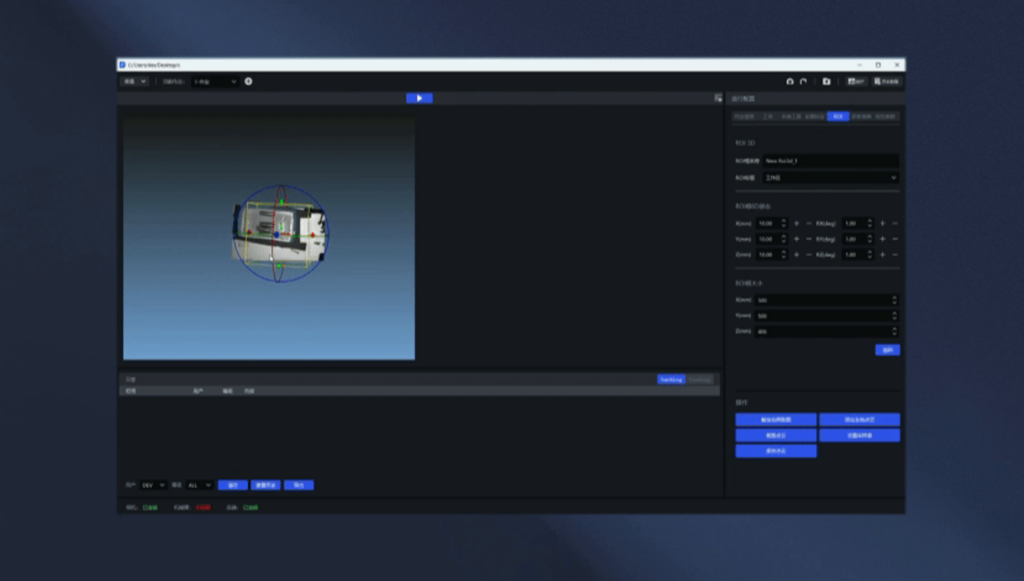
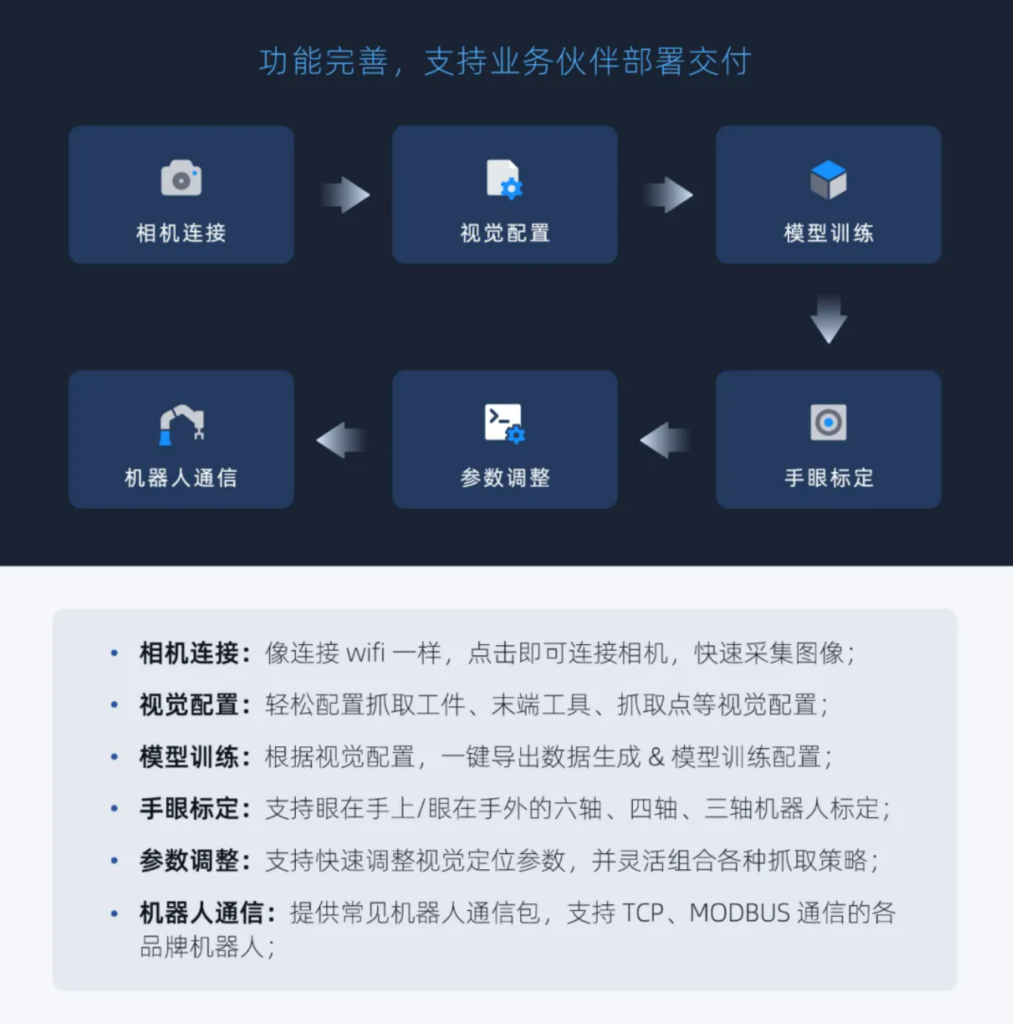
6月27日,跨维智能正式推出软硬件结合的3D视觉引导无序抓取套件,基于跨维智能自研 DexVerse™ 具身智能引擎,主打高通用性、易用性和标准化。客户仅需提供工件的 CAD,即可生成工件不同姿态、不同环境下的合成数据,无需现场采集并标注真实数据,即可完成模型训练,结合零代码、零编程的3D视觉引导软件,5分钟配置,最快2小时即可投产使用。