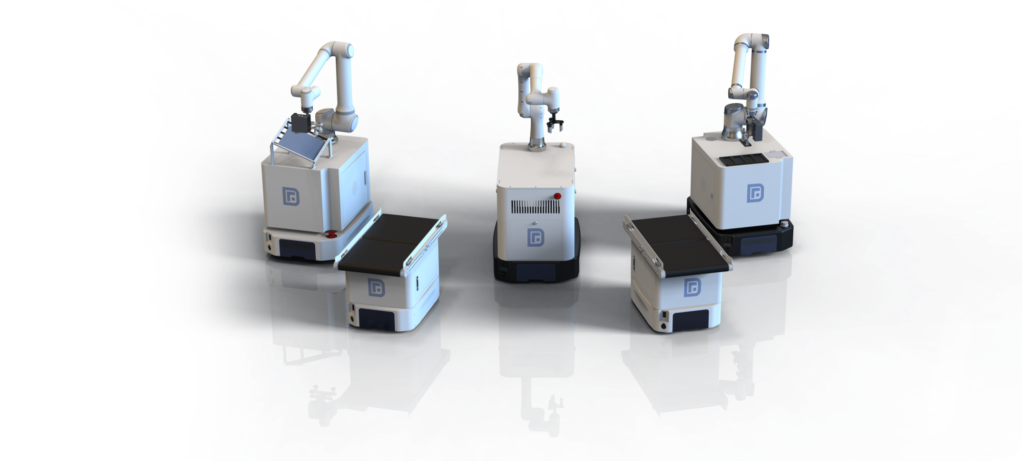
基于 3D 生成式 AI 的 Sim2Real AI 引擎DexVerse™ 在工业化场景的落地,DexAgent 复合机器人具有高兼容性,可灵活配置的特点,对物料上下料抓取,搬运,替代传统人工作业抓取搬运,有效提高产线的生产效率和生产质量;同时,该机器人为模块化架构,可根据多变的生产环境进行生产组合,触及更多更广的生产范围,以满足客户日益增长的 柔性化需求。适用于 3C 电子、汽车、装配等各个场景中的柔性化应用需求。
产品优势
自研算法
基于自研的 DexVerse”具身智能引擎,多模态 3D 视觉-语言-动作基础模型实现整个流程自动化,以极强的通用性和泛化能力满足现场应用需求