首页
人形机器人
具身视觉套件
核心技术
资源中心
文档中心
下载中心
媒体中心
关于跨维
采购/合作
中
/
EN
人形机器人
具身智能引擎
DexForce W1 Pro
DexVerse™ 具身智能引擎
环境资产
机器人资产
环境资产
视觉传感
力/力矩传感
触觉传感
在线并行数据流
DexGen
基于具备一定物理特性的物体
DexSim
数据生成
DexAI
模型训练
可微分生成模拟
模型评估
模型部署
国内唯一底层自研的DexVerse™具身智能引擎
打造高效的自动生成“数据-模型”工具链,可规模化应用于广泛的场景、机器人任务中
低成本、高效生成海量 3D 场景和数据集
DexVerse™ 引擎可以通过语言,图像,视频等模态输入,高效生成符合真实语意且含带正确几何物理信息的 3D 场景,结合由底层提供的高精度物理仿真,实时图像渲染以及高保真传感器模拟的能力,可以生成海量高质量的合成数据。这些数据涵盖光线折射、物体摩擦系数、刚体,软体和流体动态变化等多维度细节
基于引擎驱动的流式数据和在线模型训练范式
通过引擎的高并发仿真能力,结合自动化、高柔性的数据生成能力,DexVerse™ 引擎实现了大规模、多任务、海量场景及资产的在线式仿真数据流管道,使得 AI 模型可以进行持续学习。结合领先的域随机和可微分仿真技术,让模型和自适应的进化和有效克服虚拟到现实的差异
高鲁棒泛化能力
基于丰富海量的数据,和先进的训练范式,以及一系列首创的模型架构设计方法,由DexVerse™ 引擎所训练出来的模型具备强大的通用性和鲁棒性,能够在目标应用场景达到高达 99.9%的准确率
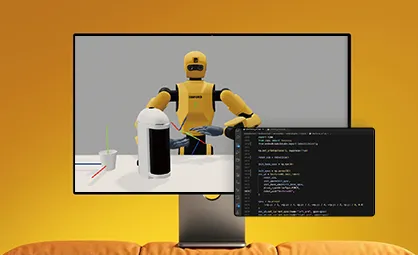
任务指令
机器人端水果
机器人端水果
机器人整理桌面
机器人垒杯子
机器人端盘子
请填写以下信息
我们的专业顾问会尽快与您联系!
姓名:
联系方式:
公司:
电子邮箱:
城市:
意向内容:
产品咨询
媒体合作
投资意向
其他
备注:
取消
提交信息