感知
视觉感知:仿人双目纯视觉和腕部视觉传感器,物体识别高精度3D重建
力控感知:腕部可选配六维力传感器, 仿人力控,柔顺安全
语音感知:融合语言大模型,超拟人合成,实时对话有生命
导航感知:以SLAM导航为主,VSLAM导航为辅,轻松应对各种恶劣场景
大脑+小脑
大小脑联合控制(大模型)
Sim2Real VLA Pipeline 海量数据(EmbodiChain)在线生成、在线训练模型
系统总算力≥300TOPS
支持双PC硬件,提高更高算力
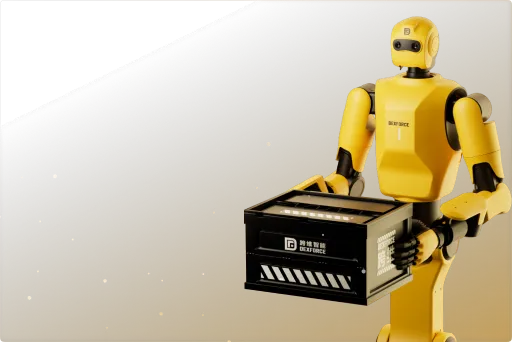
执行
全身最大自由度40pcs
机械臂高灵活度、超大操作可达性,单臂最大负载10kg
躯干可升降、旋转、俯仰
底盘可选配手动底盘、差速底盘、全向底盘
灵巧手/二指夹爪轻松应对家用、商用、工业场景
高频控制:运动控制频率1000次/秒
高速通信:动力单元通信带宽100Mbps
6cm 基线仿人双目纯视觉
交互语音模型
力控传感器
选配腕部相机×2
SLAM导航避障激光雷达×2
VSLAM导航避障相机×2
Sim2Real VLA
PC2
PC1
颈部自由度 2pcs
机械臂自由度 7pcs
腰部自由度 2pcs
机械手自由度:
灵巧手(单手)自由度 6pcs
两指夹爪(单手)自由度 2pcs
灵巧手(单手)自由度 6pcs
两指夹爪(单手)自由度 2pcs
腿部自由度 2pcs
底盘自由度:
全向底盘自由度 8pcs
差速底盘自由度 2pcs
全向底盘自由度 8pcs
差速底盘自由度 2pcs